
Single-Tasking and Multi-Tasking
A single-tasking system can only run one program at a time, while a multi-tasking OS allows more than one program to be running in concurrency. This is achieved by time-sharing, where the available processor time is divided between multiple processes. These processes are each interrupted repeatedly in time slices by a task-scheduling subsystem of the operating system. Multi-tasking may be characterized in preemptive and co-operative types.In preemptive multitasking, the operating system slices the CPU time and dedicates a slot to each of the programs. Unix-like operating systems, such as Solaris and Linux—as well as non-Unix-like, such as AmigaOS—support preemptive multitasking. Cooperative multitasking is achieved by relying on each process to provide time to the other processes in a defined manner.16-bit versions of Microsoft Windows used cooperative multi-tasking; 32-bits versions of both Windows NT and Win9x used preemptive multi-tasking.
Single-User and Multi-User
Single-user operating systems have no facilities to distinguish users, but may allow multiple programs to run in tandem. A multi-user operating system extends the basic concept of multi-tasking with facilities that identify processes and resources, such as disk space, belonging to multiple users, and the system permits multiple users to interact with the system at the same time. Time-sharing operating systems schedule tasks for efficient use of the system and may also include accounting software for cost allocation of processor time, mass storage, printing, and other resources to multiple users.Batch operating system

Advantages of Batch Operating System:
- It is very difficult to guess or know the time required by any job to complete. Processors of the batch systems know how long the job would be when it is in queue
- Multiple users can share the batch systems
- The idle time for batch system is very less
- It is easy to manage large work repeatedly in batch systems
- The computer operators should be well known with batch systems
- Batch systems are hard to debug
- It is sometime costly
- The other jobs will have to wait for an unknown time if any job fails
- Lack of interaction between the user and the job.
- CPU is often idle, because the speed of the mechanical I/O devices is slower than the CPU.
- Difficult to provide the desired priority.
Examples of Batch based Operating System: Payroll System, Bank Statements etc.
Time-sharing operating systems

Time-sharing is a technique which enables many people, located at various terminals, to use a particular computer system at the same time. Time-sharing or multitasking is a logical extension of multiprogramming. Processor's time which is shared among multiple users simultaneously is termed as time-sharing.
The main difference between Multiprogrammed Batch Systems and Time-Sharing Systems is that in case of Multiprogrammed batch systems, the objective is to maximize processor use, whereas in Time-Sharing Systems, the objective is to minimize response time.
Multiple jobs are executed by the CPU by switching between them, but the switches occur so frequently. Thus, the user can receive an immediate response.
For example, in a transaction processing, the processor executes each user program in a short burst or quantum of computation. That is, if n users are present, then each user can get a time quantum. When the user submits the command, the response time is in few seconds at most.
The operating system uses CPU scheduling and multiprogramming to provide each user with a small portion of a time. Computer systems that were designed primarily as batch systems have been modified to time-sharing systems.
Advantages of Timesharing operating systems are as follows −

Distributed systems use multiple central processors to serve multiple real-time applications and multiple users. Data processing jobs are distributed among the processors accordingly.
The processors communicate with one another through various communication lines (such as high-speed buses or telephone lines). These are referred as loosely coupled systems or distributed systems. Processors in a distributed system may vary in size and function. These processors are referred as sites, nodes, computers, and so on.
The operating system uses CPU scheduling and multiprogramming to provide each user with a small portion of a time. Computer systems that were designed primarily as batch systems have been modified to time-sharing systems.
Advantages of Timesharing operating systems are as follows −
- Provides the advantage of quick response.
- Avoids duplication of software.
- Reduces CPU idle time.
- Problem of reliability.
- Question of security and integrity of user programs and data.
- Problem of data communication.
Examples of Time-Sharing OSs are: Multics, Unix etc.
Distributed operating System
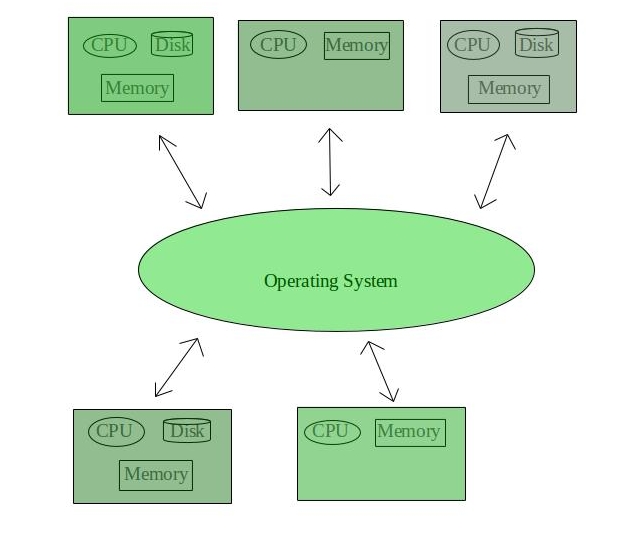
Distributed systems use multiple central processors to serve multiple real-time applications and multiple users. Data processing jobs are distributed among the processors accordingly.
The processors communicate with one another through various communication lines (such as high-speed buses or telephone lines). These are referred as loosely coupled systems or distributed systems. Processors in a distributed system may vary in size and function. These processors are referred as sites, nodes, computers, and so on.
Advantages of distributed systems are as follows −
- With resource sharing facility, a user at one site may be able to use the resources available at another.
- Speedup the exchange of data with one another via electronic mail.
- If one site fails in a distributed system, the remaining sites can potentially continue operating.
- Better service to the customers.
- Reduction of the load on the host computer.
- Reduction of delays in data processing.
Disadvantages of Distributed Operating System:
- Failure of the main network will stop the entire communication
- To establish distributed systems the language which are used are not well defined yet
- These types of systems are not readily available as they are very expensive. Not only that the underlying software is highly complex and not understood well yet
Network operating System

A Network Operating System runs on a server and provides the server the capability to manage data, users, groups, security, applications, and other networking functions. The primary purpose of the network operating system is to allow shared file and printer access among multiple computers in a network, typically a local area network (LAN), a private network or to other networks.
Examples of network operating systems include Microsoft Windows Server 2003, Microsoft Windows Server 2008, UNIX, Linux, Mac OS X, Novell NetWare, and BSD.
The advantages of network operating systems are as follows −
- Centralized servers are highly stable.
- Security is server managed.
- Upgrades to new technologies and hardware can be easily integrated into the system.
- Remote access to servers is possible from different locations and types of systems.
- High cost of buying and running a server.
- Dependency on a central location for most operations.
- Regular maintenance and updates are required.
Examples of Network Operating System are: Microsoft Windows Server 2003, Microsoft Windows Server 2008, UNIX, Linux, Mac OS X, Novell NetWare, and BSD etc.
Real Time operating System

Real-time systems are used when there are rigid time requirements on the operation of a processor or the flow of data and real-time systems can be used as a control device in a dedicated application. A real-time operating system must have well-defined, fixed time constraints, otherwise the system will fail. For example, Scientific experiments, medical imaging systems, industrial control systems, weapon systems, robots, air traffic control systems, etc.
There are two types of real-time operating systems.











{kind=link}
0 Comments